


 Windows Media Playerのダウンロード
Windows Media Playerのダウンロード
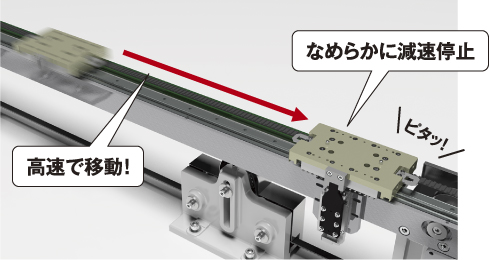
サーボモータ制御による駆動により、スムーズな
加速移動・減速停止が可能です。
また、キャリアに衝撃のない状態でのワーク搬送、
ワークの飛びのない、なめらかな搬送を実現できます。
また、高剛性のため、高速でも振動なく搬送できます。

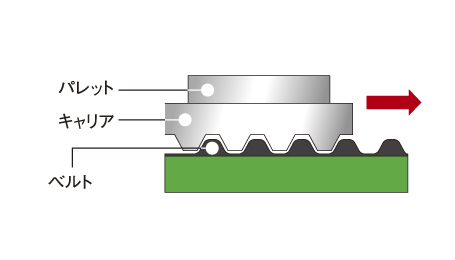
駆動にはサーボモータ採用

直動ガイド上に乗ったキャリアを
ベルト駆動により搬送[特許出願中]





※ ご視聴いただくには、Windows Media Playerが必要となります。ご利用のPCにインストールされていない方は、右バナーよりWindows Media Player(無償)をダウンロードし、インストールしてからご視聴ください。
※ Windows Media は、米国 Microsoft Corporation の米国および/またはその他の国における登録商標または商標です。

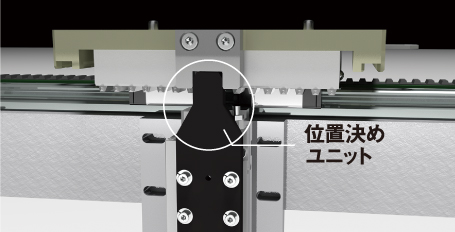
位置決めユニットにより位置決め精度を高めています。
これにより搬送上での精密加工が可能となります。
高速走行中でも安定した姿勢で移動でき、
キャリアの位置決めはメカ的に行うため、
リニアモータのように簡単に動くことはありません。
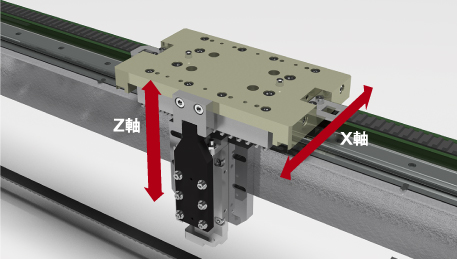
直動ガイド使用により
キャリアのXZ軸方向位置決め
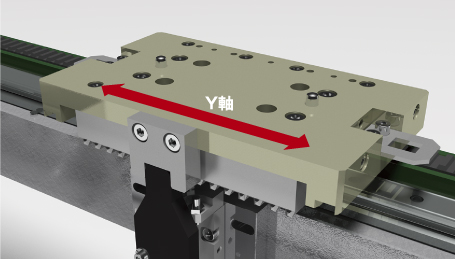
位置決めユニットにより
キャリアのY軸方向決め

サーボモータ制御による駆動により、スムーズな
加速移動・減速停止が可能です。
また、キャリアに衝撃のない状態でのワーク搬送、
ワークの飛びのない、なめらかな搬送を実現できます。
また、高剛性のため、高速でも振動なく搬送できます。
駆動にはサーボモータ採用
直動ガイド上に乗ったキャリアを
ベルト駆動により搬送[特許出願中]

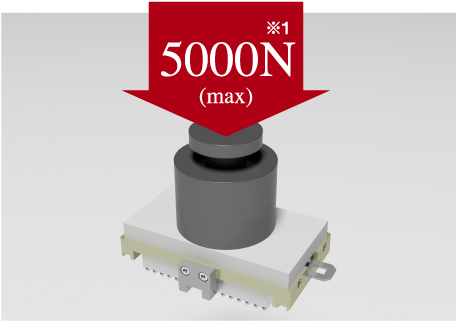
※1 オプションのサポートユニットが必要です。

最大5000N(垂直)までの負荷を
必要とする加工が可能です。
重荷重用:8LA 軽荷重用:5LA
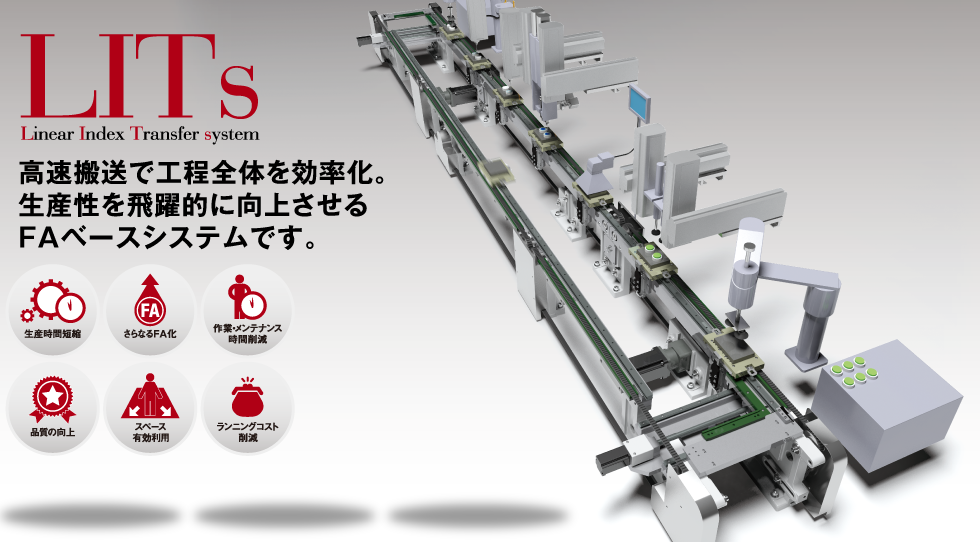
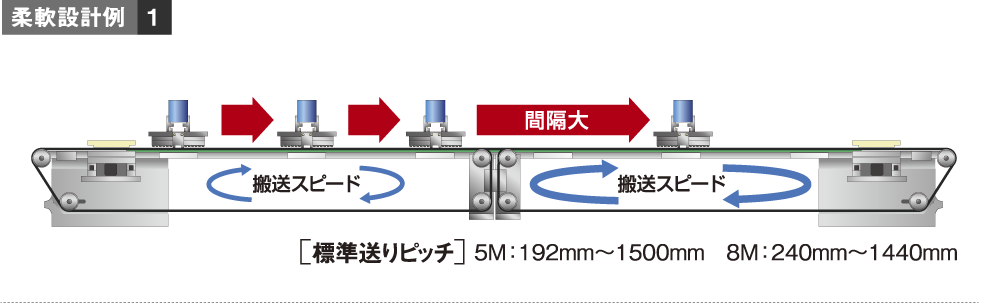
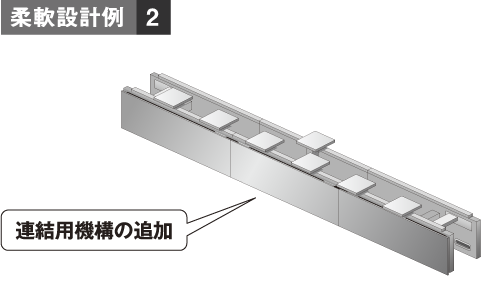
ピッチのバリエーションも豊富に用意しています。また、搬送ピッチ変更、連結ライン縦型ラインも可能であり、さまざまなご要望にフレキシブルに対応します。
搬送ピッチ変更※2[特許出願中]
連結ライン※3
縦型ライン※2

※2 カスタム生産設備での対応となります。 ※3 初期設備投資段階で対応します。(増設対応ではありません)

お客様の課題を掴み、ニーズをヒアリングします。
(ヒアリング内容)ワーク形式、大きさ、加工工程(最大負荷荷重等)、
必要生産数量に応じた必要軸数、生産環境など。
必要に応じて要素実験・試作を行います。ヒアリング内容を基に構想設計します。
この段階でFAベースを決定します。実際の形へ具現化する為の詳細設計を行います。
各段階に応じてDR(デザインレビュー)を実施します。
国内外調達ネットワークを駆使して迅速な資材調達に努めています。
搬送部含めた設備の架台・ユニット部は自社加工センターにて、製缶加工、
鋳物一体加工しております。
専門の熟練スタッフが、丁寧かつ迅速に組立します。
システム構築に必要な骨組みプログラムと要素工法を盛り込んだ
モーションプログラムを作成し、精密部品を扱う為に最適な機械動作を構築します。
社内にてプログラミング調整、ランニングテストを実施し、品質確認を致します。
その後、お客様立会のもと最終確認をしていただきます。
お客様工場にて据付・稼動確認をして納品とさせて頂きます。
消耗品も含め、良い設備を長く使っていただくのが私たちの願いであり、
常にお客様と一体となって生産体制のフォローをさせて頂きます。

| 仕様 | LA8タイプ | LA5タイプ |
|---|---|---|
|
耐荷重 (キャリア1枚当り) |
垂直方向 サポートユニット取付時
5000N (ただしキャリアセンター) |
垂直方向 サポートユニット取付時
2000N (ただしキャリアセンター) |
|
水平方向 サポートユニット取付時
100N・m |
水平方向 サポートユニット取付時
50N・m |
|
| 最大積載荷重(キャリア1枚当り) | 15kgまで(標準キャリア重量含む) | 6kgまで(標準キャリア重量含む) |
| 保証期間 | 1年/連続稼働の場合は2000時間 | |
| 使用環境 |
|
|